Detta är Nationella Riktlinjer för livscykelmiljö för byggd miljös lagringsplats av metodbeskrivningar
Inmätning genom 3D-laserscanning - Metod för Inmätning genom 3D-laserscanning
Syftet med denna metod är att visa hur man tar fram tredimensionella och objektorienterade relationsmodeller baserat på 3D-skanning. De resulterande 3D-modellerna kan sedan användas för både projektering och förvaltning av byggnader och anläggningar, vilket gör det möjligt att effektivisera både byggprocessen och den långsiktiga förvaltningen.
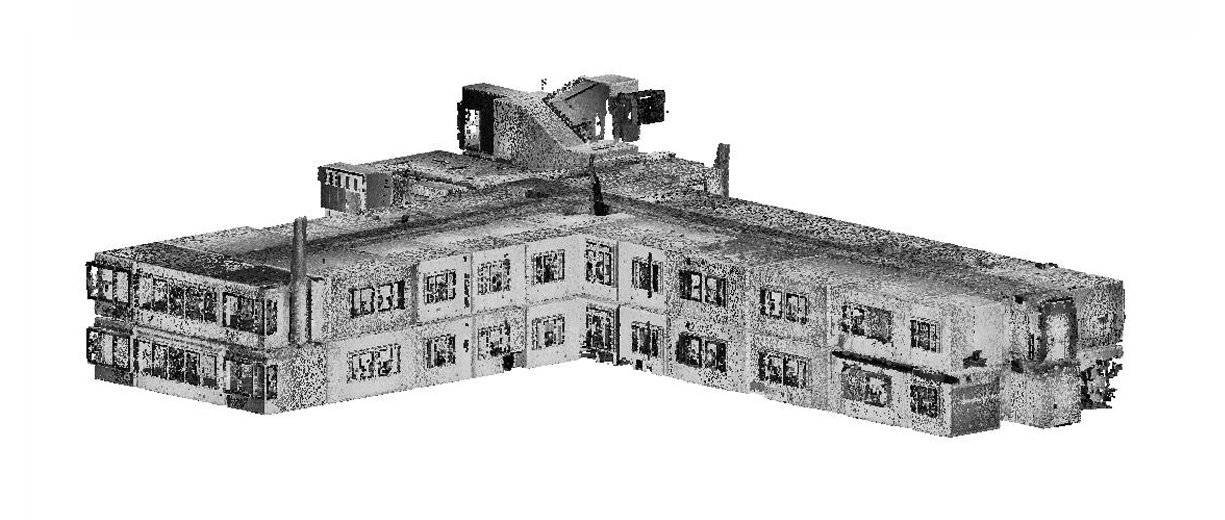
3D-skanning, även känd som laser- eller punktmolnskanning, har revolutionerat hur vi dokumenterar och visualiserar fysiska objekt och miljöer. Genom att använda avancerad lasersensor-teknik kan 3D-skanning skapa exakta digitala representationer av verkliga platser och föremål med enastående precision och detaljrikedom.
Fördelar med laserscanning:
För dig som planerar att beställa inmätning med 3D-laserscanning är det viktigt att ha svar på följande frågor:
Det finns en skillnad mellan mätnoggrannhet/precision och punkttäthet. Mätnoggrannhet avser hur väl en enskild mätpunkt överensstämmer med verkligheten. Detta värde är en egenskap hos instrumentets konstruktion och olika instrument har olika noggrannhet.
Punkttäthet refererar till hur tätt punkter skannas, det vill säga avståndet mellan punkterna. Om man behöver fånga små detaljer måste mätningar göras tätt intill varandra.
Skanningen bör utföras med utrustning som kan uppnå en noggrannhet på 10 mm över 30 meter, helst bättre än 3 mm över 20–30 meter. Ju högre noggrannhet på mätutrustningen, desto bättre överensstämmelse med verkligheten. Det är att rekommendera att sträva efter utrustning med så hög noggrannhet som möjligt, eftersom avvikelser i större moln ackumuleras när enskilda mätningar kombineras.
Det finns även utrustningsalternativ som rullas runt på en vagn, bärs av en person eller monteras på en drönare. Generellt sett, om instrumentet rör sig under mätningen, minskar noggrannheten med rörelsen. I praktiken blir noggrannheten för dessa instrument i centimeter istället för millimeter.
Horisontell justering: Olika instrument använder olika metoder för horisontering. Mindre kostsamma instrument har elektroniska inklinometrar som justerar punktmolnet till rätt horisontal justering baserat på mätningar i början och slutet av skanningen. De dyrare instrumenten på marknaden använder riktiga kompensatorer som justerar varje enskilt svep horisontellt, vilket ökar precisionen och tillförlitligheten för den horisontella justeringen i punktmolnet.
När skannern mäter med samma punkttäthet i alla vinklar blir punktätheten beroende av avståndet, med en högre densitet närmast instrumentet och en lägre densitet längre bort. Till exempel ger en punkttäthet på 12 mm/10 m en densitet på 1,2 mm per meter från skannern. Detta kan åtgärdas genom att efterbehandlingen sätter en minimipunktäthet och därigenom minskar densiteten av överflödiga punkter nära skannern.
Originalupplösning: Punkttätheten är mycket hög med hög detaljnivå och leder ofta till tunga modeller att hantera. Används för arkivering och för att bevara detaljerade strukturer som till exempel stuckatur.
Upplösning 10 mm: Medelhög punkttäthet med bra detaljnivå. Detta är den vanligaste upplösningen om man vill beställa ett punktmoln för att verifiera en relationsmodell mot verkligheten och ta exakta mått.
Upplösning 20 mm: Lägre detaljnivå jämfört med 10 mm. Används vanligtvis när installatörer exempelvis endast behöver veta var de kan placera sina rör.
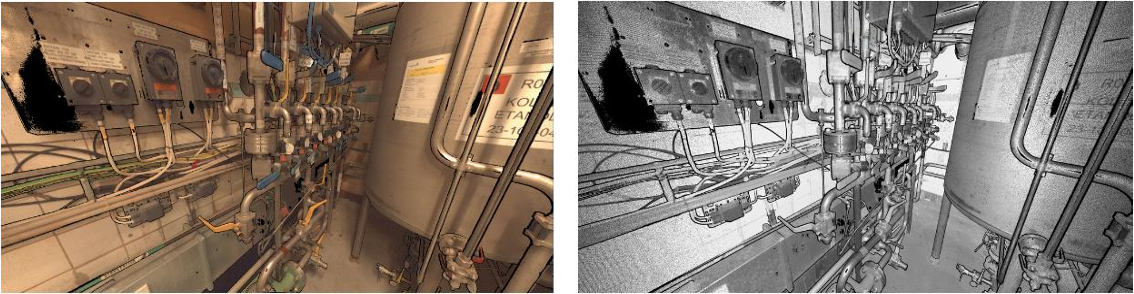
Gråskala: Den vanligaste typen av punktmoln är att varje enskild punkt "färgas" i gråskala baserat på det ljus som reflekteras från ytan som mäts. Detta liknar hur våra ögon fungerar i mörker.
Färgad: Punktmoln som innehåller färginformation från bilder, antingen tagna med den inbyggda kameran i utrustningen eller från externa foton som lagts till under efterbehandlingen. Denna typ av punktmoln kan användas till exempel för kartframställning och för att skilja mellan olika objekt, som ledningar eller rör, genom att tilldela dem olika färger. Att skapa ett färgat punktmoln tar längre tid jämfört med ett i gråskala, eftersom instrumentet måste ta foton vid varje position.
Hybrid: Detta punktmoln integrerar fotorealistiska 360⁰-bilder, vilket möjliggör exakta mätningar direkt i punktmolnet med hög precision. Dessutom erbjuder det möjligheten att digitalt vandra runt i en byggnad.

Det finns många filformat, och varje format har sina egna specifika styrkor och svagheter beroende på skanningsmetoden, olika programvaror har olika möjlighet att läsa in och använda sig av de olika formaten.
| Format | Använding | Kompatibel |
| .e57 | Rådata | Revit, Tekla, Microstation, Navisworks |
| .las | Rådata | Revit, Tekla, Microstation, ArchiCAD, Navisworks |
| .rcp eller .rcs | Punktmoln | Revit, Tekla, ArchiCAD, Microstation, Navisworks, |
| .xyz | Punktmoln | Tekla, AutoCAD, Microstation, ArchiCAD |
| .pod | Punktmoln | Microstation |
Tabell - Filformat
Prestandan minskar när storleken på punktmolnet ökar, särskilt vid högre upplösningar, och gränsen beror helt på användarens maskinkonfiguration, särskilt GPU, CPU och RAM. Generellt sett bör punktmolnet helst inte överstiga 4 GB om det ska importeras i 3D CAD/BIM-program. Om punktmolnet blir för stort kan det delas upp per våning, del eller rum för att hålla ner filstorleken och bibehålla hanterbarheten.
Storleken på punktmolnet beror på den valda upplösningen och filformatet vid export.
Punktmolnen måste georefereras, vilket innebär att de transformeras till stadens aktuella koordinat- och höjdsystem (Sweref 99 xx xx och RH00/2000). För att sammanfoga alla uppsättningpunkter till ett gemensamt koordinatsystem ska punktmolnen mätas in mot stadens stompunkter. Beställaren tillhandahåller stompunktern att utgå ifrån, eller så etableras dessa av mätingenjören (kan beställas från Lantmäteriet). GPS-enheter eller måltavlor kan användas för att mäta in punktmolnen, men dessa har vanligtvis lägre precision.
Om önskat kan punktmolnet flyttas till projektets nollpunkt av projektören.
Observera att för en del CAD/BIM-program kan punktmoln där koordinaterna ligger väldigt långt ifrån skapa avrundningsproblem eller svårighet att läsa av molnet, eftersom det finns begränsningar hur höga tal systemen kan hantera.
För att uppnå bästa resultat vid skanningen är det viktigt att följa dessa riktlinjer:
Ytan som ska laserskannas bör vara så ren som möjligt, utan hinder såsom undertak, möbler eller puts. Även om verksamheten är i drift kan skanningen utföras, men det är viktigt att diskutera för- och nackdelar med att skanna under drifttid.
Se till att ytorna som ska skannas är tillgängliga, till exempel genom att säkerställa att våningsplanet är tomt vid en viss tidpunkt och att mätingenjören har full tillgång till alla utrymmen. Ibland kan det vara nödvändigt att se till att delar eller hela undertak öppnas upp för att kunna få med installationer och undersida av bjälklag.
Bestäm om hiss- och trapphus också ska laserskannas.
Dimma, damm, rök och ogynnsamma väderförhållanden kan påverka kvaliteten på skanningen, så se till att dessa faktorer tas hänsyn till.
Andra möjliga tillvägagångssätt inkluderar:
3D CAD-modeller / 2D-ritningar från punktmoln: Objektbaserade CAD-modeller kan genereras från punktmoln och bör följa beställarens projekteringsanvisningar och informationsleveranser enligt den beslutade nivån (till exempel kan 2D-sektioner beställas även utan en 3D-modell).
Skanning med drönare: Användning av drönare för inventering av tak och markskanning. Omfattningen kan anpassas efter utvecklingen av teknik och behov.
Skanning med robotar: Robotteknik möjliggör effektiv skanning från olika vinklar och kan fokusera på nödvändiga detaljer för att säkerställa hög kvalitet på resultatet.
Analys: Möjlighet till realtidsanalyser och simuleringar baserat på punktmoln, men detta kräver specifik hårdvara och installationer. Exempelvis kan golv- och ytanalyser utföras för att identifiera jämnhet eller avvikelser under produktionen.